diff vs bare: +88/-196
// Mug with handle on +X side
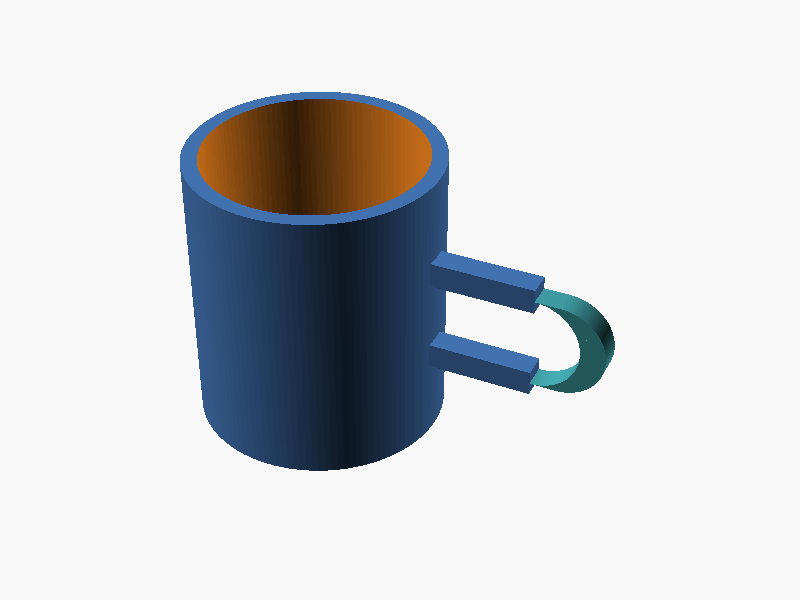
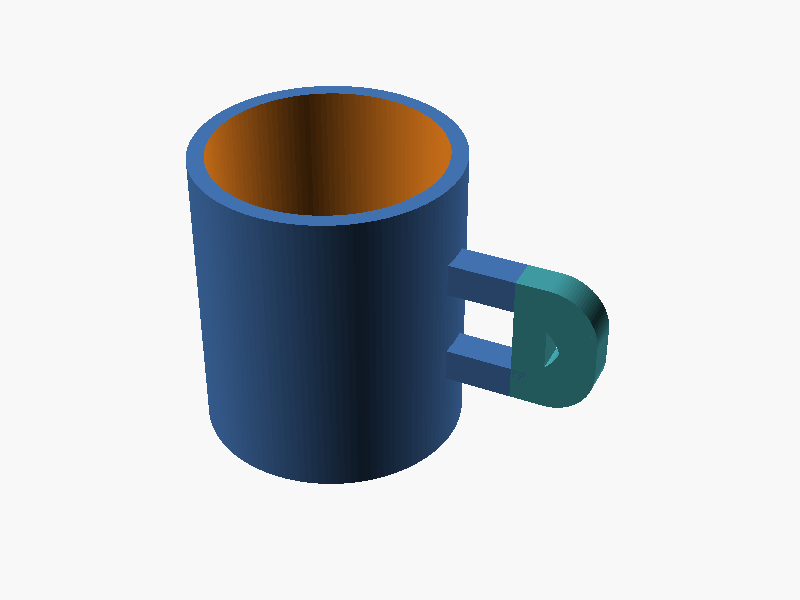
+ // Body: outer_r=40, inner_r=35, height=90, bottom=6mm
+ // Handle: inner space 30mm(H) x 25mm(W), on +X side, centered at mug mid-height
- // Parameters
- outer_r = 40; // outer radius = 80mm diameter
- inner_r = 35; // inner radius = 70mm diameter
- mug_h = 90; // mug height
- bot_t = 6; // bottom thickness
+ $fn = 128;
- // Handle parameters
- // Inner space: height 30mm, width 25mm
- // Handle cross-section tube radius
- tube_r = 3.5; // handle tube cross-section radius (wall thickness ~3.5mm)
+ outer_r = 40;
+ inner_r = 35;
+ mug_h = 90;
+ bot_t = 6;
- // The handle is a D-shape torus arc on +X side
- // Center of the D arc is at x = outer_r (on the mug surface)
- // The arc spans 180 degrees (semicircle) facing +X
- // Handle inner space: 30mm tall, 25mm wide
- // So the arc center is at the mug outer surface, and the loop extends outward
+ // Handle design
+ // Cross-section radius of handle tube
+ tube_r = 6;
- h_space_h = 30; // inner height of handle space
- h_space_w = 25; // inner width of handle space
+ // Inner clear space of handle: 30mm tall, 25mm wide
+ h_space_h = 30;
+ h_space_w = 25;
- // The handle loop:
- // Two vertical bars connect at y=0 plane (on +X side of mug)
- // separated by h_space_h in Z, centered at mug mid-height
- // The outer D-curve has radius = h_space_w / 2 + outer connection offset
+ // Handle center Z
+ handle_z = mug_h / 2; // = 45
- // Handle center Z position
- handle_z = mug_h / 2;
+ // The handle path (centerline) lies in the Y=0 plane.
+ // The straight (mug-side) portions run vertically at X = outer_r + tube_r,
+ // from Z = handle_z - h_space_h/2 to Z = handle_z + h_space_h/2
+ // (embedded into the mug wall for solid union)
+ //
+ // The outer arc is a circular arc connecting the two vertical ends,
+ // bulging in the +X direction.
+ //
+ // Arc geometry:
+ // Endpoints in XZ plane:
+ // P_bot = (outer_r + tube_r, handle_z - h_space_h/2)
+ // P_top = (outer_r + tube_r, handle_z + h_space_h/2)
+ // The arc must extend to X = outer_r + tube_r + h_space_w at Z = handle_z.
+ //
+ // Let arc center = (cx, handle_z).
+ // R = cx - (outer_r + tube_r) [rightmost reach] → cx = outer_r + tube_r + R - h_space_w ... wait
+ // R = (outer_r + tube_r + h_space_w) - cx
+ // Also passes through P_bot:
+ // R^2 = (outer_r + tube_r - cx)^2 + (h_space_h/2)^2
+ // Let A = outer_r + tube_r, B = h_space_h/2 = 15, W = h_space_w = 25
+ // R = (A + W) - cx → cx = A + W - R
+ // R^2 = (A - cx)^2 + B^2
+ // = (A - (A + W - R))^2 + B^2
+ // = (R - W)^2 + B^2
+ // R^2 = R^2 - 2RW + W^2 + B^2
+ // 0 = -2RW + W^2 + B^2
+ // R = (W^2 + B^2) / (2W)
+ // = (625 + 225) / 50 = 850/50 = 17
- // The handle consists of:
- // 1. A swept D-shape path
- // We model the handle as a rotate_extrude arc + two connection bars
+ arc_R = (h_space_w*h_space_w + (h_space_h/2)*(h_space_h/2)) / (2*h_space_w);
+ // arc_R = 17
- // Arc radius for the outer D:
- // inner space width = 25mm, tube diameter = 2*tube_r = 7mm
- // arc center at x = outer_r (mug surface), arc inner radius ≈ h_space_w/2
- // arc center offset from mug axis:
- arc_cx = outer_r; // arc center x (at mug outer surface level)
- arc_r = h_space_w / 2 + tube_r; // radius of arc centerline = 12.5 + 3.5 = 16
+ // Arc center X:
+ arc_cx = outer_r + tube_r + h_space_w - arc_R;
+ // = 40 + 6 + 25 - 17 = 54
- // Vertical bar half-height
- bar_half = h_space_h / 2 + tube_r; // = 18.5
+ // Angles of endpoints from arc center (in XZ plane, measured from +X axis):
+ // P_bot relative to arc center: (outer_r+tube_r - arc_cx, -(h_space_h/2))
+ // dx = 46 - 54 = -8, dz = -15
+ // P_top: dx=-8, dz=+15
+ a_bot = atan2(-(h_space_h/2), (outer_r + tube_r) - arc_cx); // atan2(-15,-8) ≈ -118.07°
+ a_top = atan2( (h_space_h/2), (outer_r + tube_r) - arc_cx); // atan2(+15,-8) ≈ +118.07°
+ // Arc sweeps from a_bot to a_top through 0° (+X direction)
- module mug_body() {
- difference() {
- // Outer cylinder
- cylinder(r = outer_r, h = mug_h, center = false, $fn = 128);
- // Inner hollow (starts from bottom thickness)
- translate([0, 0, bot_t])
- cylinder(r = inner_r, h = mug_h - bot_t + 0.1, center = false, $fn = 128);
- }
- }
+ N_arc = 48; // number of segments for arc
module handle() {
- // The handle is on the +X side
- // It consists of:
- // - Two vertical straight segments (bars) at x=outer_r, y=0,
- // from z=handle_z-bar_half to z=handle_z+bar_half (but only the tube length)
- // - A semicircular arc connecting them on the outside
- // - The bars connect back into the mug body (embedded in mug wall)
-
- // We build the handle as:
- // A. Semicircular arc (rotate_extrude of 180 deg) at handle Z mid, but this is for
- // a torus section — we need a 3D path sweep.
- //
- // Instead, use hull-based approach for robustness:
- // Place spheres along the path and hull them, or use explicit geometry.
- //
- // Approach:
- // Top bar: cylinder from mug surface to arc top
- // Bottom bar: cylinder from mug surface to arc bottom
- // Outer arc: half torus (rotate_extrude 180 deg of circle translated)
- // Connection blobs at joints
-
- // The arc is a half-torus:
- // - centered at (arc_cx, 0, handle_z) -- NO, the arc is in the XY plane per Z slice
- // - Actually we want a half-torus in the XZ plane...
- //
- // Let me think differently:
- // The D-handle lives in the XZ plane (y≈0 plane, extended in X and Z).
- // The cross-section of the handle tube is a circle of radius tube_r.
- // The path of the handle centerline is:
- // - Vertical segment: x=outer_r, y=0, z from (handle_z - h_space_h/2) to (handle_z + h_space_h/2)
- // But this segment is INSIDE the mug wall — the actual visible bars are from x=outer_r outward
- // Actually the path:
- // Bottom attachment: (outer_r, 0, handle_z - h_space_h/2)
- // Top attachment: (outer_r, 0, handle_z + h_space_h/2)
- // Outer arc: semicircle of radius arc_r centered at (outer_r, 0) in XY...
- // No — centered at (outer_r, 0, handle_z) sweeping in XZ plane
-
- // The centerline of the handle:
- // Start: (outer_r, 0, handle_z - h_space_h/2)
- // Go to: semicircle in the XZ plane around center (outer_r, 0, handle_z)
- // with radius = h_space_h/2, from bottom to top, bulging in +X direction
- // Wait, that would make the arc radius = h_space_h/2 = 15mm, width = 15mm not 25mm
-
- // Let me redefine:
- // The handle path in the plane y=0:
- // Bottom point: A = (outer_r, 0, handle_z - h_space_h/2)
- // Top point: B = (outer_r, 0, handle_z + h_space_h/2)
- // The outer arc connects A to B going through +X
- // Arc center: C = (outer_r, 0, handle_z)
- // Arc radius in XZ plane: the arc must reach x = outer_r + h_space_w at midpoint
- // So arc radius = h_space_w = 25mm (from C to the rightmost point)
- // But then the arc from C to A has length sqrt(h_space_w^2 + (h_space_h/2)^2) ≠ h_space_w
- //
- // For a true semicircle: arc_radius = sqrt((h_space_h/2)^2 + h_space_w^2) ... no
- //
- // Actually for D-shape: the straight part is the vertical line x=outer_r,
- // and the curved part is a semicircle.
- // For semicircle: diameter = h_space_h, so radius = h_space_h/2 = 15
- // But then width = radius = 15mm, not 25mm.
- //
- // To get width=25 with height=30: use an ellipse, or use a larger arc.
- // Let's use: arc center at (outer_r + h_space_w - arc_rad, 0, handle_z)
- // where arc_rad is chosen so the arc passes through A and B and extends to x=outer_r+h_space_w
- //
- // Simplest: just use a circular arc where:
- // - the two endpoints are at (outer_r, 0, handle_z ± h_space_h/2)
- // - the arc bulges to x = outer_r + h_space_w at z = handle_z
- //
- // Arc center at (outer_r - d, 0, handle_z) for some d, radius R:
- // R^2 = d^2 + (h_space_h/2)^2 [passes through endpoints]
- // R = d + h_space_w [reaches x = outer_r + h_space_w]
- // So: (d + h_space_w)^2 = d^2 + (h_space_h/2)^2
- // d^2 + 2*d*h_space_w + h_space_w^2 = d^2 + (h_space_h/2)^2
- // 2*d*h_space_w = (h_space_h/2)^2 - h_space_w^2
- // d = ((h_space_h/2)^2 - h_space_w^2) / (2*h_space_w)
- // d = (225 - 625) / 50 = -400/50 = -8
- // So d = -8, R = -8 + 25 = 17
- // Arc center at (outer_r - (-8), 0, handle_z) = (outer_r + 8, 0, handle_z)
- // Radius = 17mm
- // Check: distance from center to endpoint = sqrt(8^2 + 15^2) = sqrt(64+225) = sqrt(289) = 17 ✓
- // Rightmost point: center_x + R = outer_r + 8 + 17 = outer_r + 25 ✓
-
- arc_center_x = outer_r + 8;
- arc_center_z = handle_z;
- arc_radius = 17;
-
- // Angle of endpoints from arc center:
- // endpoint is at (outer_r, handle_z ± h_space_h/2) relative to arc center at (outer_r+8, handle_z)
- // vector from arc_center to bottom endpoint: (-8, -15) in (x,z)
- // angle = atan2(-15, -8) ... but we want angle from +X axis in XZ plane
- // angle_bottom = atan2(-(h_space_h/2), -8) measured from +X of arc
- // In standard: angle from +X axis: atan2(z_component, x_component)
- // bottom endpoint relative to arc center: dx = outer_r - arc_center_x = -8, dz = -15
- // angle_bottom (from +X, CCW in XZ) = atan2(-15, -8) ≈ 180+61.9 = -118.1° or 241.9°
- // top endpoint: dx=-8, dz=+15 → angle_top = atan2(15,-8) ≈ 180-61.9 = 118.1°
- //
- // The arc from bottom to top going through +X (rightmost point at angle=0):
- // from angle_bottom to angle_top going through 0°
- // That's from -118.1° to +118.1° (total arc = 236.2°) ... that's more than semicircle
- // Hmm, let me reconsider.
-
- // Actually the arc should only be the outer curved part (not enclosing the full D).
- // The D shape: straight vertical line on left (at x=outer_r), arc on right.
- // The arc goes from bottom-right to top-right of the straight line, curving outward.
-
- // Let me just build the handle with linear_extrude / hull approach for simplicity.
-
- // SIMPLIFIED APPROACH using hull of cylinders:
- // We'll create the handle cross-section as a tube (hollow) but since we're doing union
- // with the mug, we just need the solid handle shape.
-
- // Build handle as solid D-ring using rotate_extrude trick won't work for D in XZ plane.
-
- // Use polygon + rotate approach:
- // The handle sweep path is in the XZ plane (y=0).
- // Cross section is a circle of radius tube_r.
- // We approximate the handle as a series of hull() segments.
-
- // Let's use N segments for the arc
- N = 32;
- // arc from angle_start to angle_end (in degrees, in XZ plane, 0=+X, 90=+Z)
- a_bottom = atan2(-(h_space_h/2), -8); // ≈ -118.07° → let's use 180+atan2(15,8)
- a_top = atan2( (h_space_h/2), -8); // ≈ 118.07°
-
- // Going from a_bottom to a_top through 0° (i.e., through +X direction)
- // a_bottom ≈ -118.07, a_top ≈ 118.07
- // sweep from -118.07 to 118.07 through 0 (the short way going via 0)
-
- a_start = atan2(-(h_space_h/2), -(arc_center_x - outer_r));
- a_end = atan2( (h_space_h/2), -(arc_center_x - outer_r));
-
- // Build the arc as union of hull'd sphere-pairs
union() {
- // Arc segments
- for (i = [0:N-1]) {
- a1 = a_start + (a_end - a_start) * i / N;
- a2 = a_start + (a_end - a_start) * (i+1) / N;
- x1 = arc_center_x + arc_radius * cos(a1);
- z1 = arc_center_z + arc_radius * sin(a1);
- x2 = arc_center_x + arc_radius * cos(a2);
- z2 = arc_center_z + arc_radius * sin(a2);
+ // --- Outer arc (tube swept along arc path) ---
+ for (i = [0 : N_arc-1]) {
+ a1 = a_bot + (a_top - a_bot) * i / N_arc;
+ a2 = a_bot + (a_top - a_bot) * (i+1) / N_arc;
+ x1 = arc_cx + arc_R * cos(a1);
+ z1 = handle_z + arc_R * sin(a1);
+ x2 = arc_cx + arc_R * cos(a2);
+ z2 = handle_z + arc_R * sin(a2);
hull() {
- translate([x1, 0, z1]) sphere(r = tube_r, $fn = 16);
- translate([x2, 0, z2]) sphere(r = tube_r, $fn = 16);
+ translate([x1, 0, z1]) sphere(r = tube_r, $fn = 24);
+ translate([x2, 0, z2]) sphere(r = tube_r, $fn = 24);
}
}
- // Bottom vertical bar: from mug axis connection to arc bottom endpoint
- // bottom arc endpoint:
- bot_x = arc_center_x + arc_radius * cos(a_start);
- bot_z = arc_center_z + arc_radius * sin(a_start);
- top_x = arc_center_x + arc_radius * cos(a_end);
- top_z = arc_center_z + arc_radius * sin(a_end);
- // Connect bottom endpoint to mug surface (embed into mug wall)
+
+ // --- Top connection bar ---
+ // From arc top endpoint back to mug body (X = 0 plane intersect, embed deep)
+ x_top = arc_cx + arc_R * cos(a_top);
+ z_top = handle_z + arc_R * sin(a_top);
hull() {
- translate([bot_x, 0, bot_z]) sphere(r = tube_r, $fn = 16);
- translate([outer_r - tube_r, 0, bot_z]) sphere(r = tube_r, $fn = 16);
+ translate([x_top, 0, z_top]) sphere(r = tube_r, $fn = 24);
+ translate([outer_r - 2, 0, z_top]) sphere(r = tube_r, $fn = 24);
}
- // Connect top endpoint to mug surface
+
+ // --- Bottom connection bar ---
+ x_bot = arc_cx + arc_R * cos(a_bot);
+ z_bot = handle_z + arc_R * sin(a_bot);
hull() {
- translate([top_x, 0, top_z]) sphere(r = tube_r, $fn = 16);
- translate([outer_r - tube_r, 0, top_z]) sphere(r = tube_r, $fn = 16);
+ translate([x_bot, 0, z_bot]) sphere(r = tube_r, $fn = 24);
+ translate([outer_r - 2, 0, z_bot]) sphere(r = tube_r, $fn = 24);
}
}
}
- // Main model
+ module mug_body() {
+ difference() {
+ cylinder(r = outer_r, h = mug_h);
+ translate([0, 0, bot_t])
+ cylinder(r = inner_r, h = mug_h - bot_t + 0.1);
+ }
+ }
+
+ // Final model
union() {
mug_body();
handle();
}
SCAD (116 lines)
// Mug with handle on +X side
// Body: outer_r=40, inner_r=35, height=90, bottom=6mm
// Handle: inner space 30mm(H) x 25mm(W), on +X side, centered at mug mid-height
$fn = 128;
outer_r = 40;
inner_r = 35;
mug_h = 90;
bot_t = 6;
// Handle design
// Cross-section radius of handle tube
tube_r = 6;
// Inner clear space of handle: 30mm tall, 25mm wide
h_space_h = 30;
h_space_w = 25;
// Handle center Z
handle_z = mug_h / 2; // = 45
// The handle path (centerline) lies in the Y=0 plane.
// The straight (mug-side) portions run vertically at X = outer_r + tube_r,
// from Z = handle_z - h_space_h/2 to Z = handle_z + h_space_h/2
// (embedded into the mug wall for solid union)
//
// The outer arc is a circular arc connecting the two vertical ends,
// bulging in the +X direction.
//
// Arc geometry:
// Endpoints in XZ plane:
// P_bot = (outer_r + tube_r, handle_z - h_space_h/2)
// P_top = (outer_r + tube_r, handle_z + h_space_h/2)
// The arc must extend to X = outer_r + tube_r + h_space_w at Z = handle_z.
//
// Let arc center = (cx, handle_z).
// R = cx - (outer_r + tube_r) [rightmost reach] → cx = outer_r + tube_r + R - h_space_w ... wait
// R = (outer_r + tube_r + h_space_w) - cx
// Also passes through P_bot:
// R^2 = (outer_r + tube_r - cx)^2 + (h_space_h/2)^2
// Let A = outer_r + tube_r, B = h_space_h/2 = 15, W = h_space_w = 25
// R = (A + W) - cx → cx = A + W - R
// R^2 = (A - cx)^2 + B^2
// = (A - (A + W - R))^2 + B^2
// = (R - W)^2 + B^2
// R^2 = R^2 - 2RW + W^2 + B^2
// 0 = -2RW + W^2 + B^2
// R = (W^2 + B^2) / (2W)
// = (625 + 225) / 50 = 850/50 = 17
arc_R = (h_space_w*h_space_w + (h_space_h/2)*(h_space_h/2)) / (2*h_space_w);
// arc_R = 17
// Arc center X:
arc_cx = outer_r + tube_r + h_space_w - arc_R;
// = 40 + 6 + 25 - 17 = 54
// Angles of endpoints from arc center (in XZ plane, measured from +X axis):
// P_bot relative to arc center: (outer_r+tube_r - arc_cx, -(h_space_h/2))
// dx = 46 - 54 = -8, dz = -15
// P_top: dx=-8, dz=+15
a_bot = atan2(-(h_space_h/2), (outer_r + tube_r) - arc_cx); // atan2(-15,-8) ≈ -118.07°
a_top = atan2( (h_space_h/2), (outer_r + tube_r) - arc_cx); // atan2(+15,-8) ≈ +118.07°
// Arc sweeps from a_bot to a_top through 0° (+X direction)
N_arc = 48; // number of segments for arc
module handle() {
union() {
// --- Outer arc (tube swept along arc path) ---
for (i = [0 : N_arc-1]) {
a1 = a_bot + (a_top - a_bot) * i / N_arc;
a2 = a_bot + (a_top - a_bot) * (i+1) / N_arc;
x1 = arc_cx + arc_R * cos(a1);
z1 = handle_z + arc_R * sin(a1);
x2 = arc_cx + arc_R * cos(a2);
z2 = handle_z + arc_R * sin(a2);
hull() {
translate([x1, 0, z1]) sphere(r = tube_r, $fn = 24);
translate([x2, 0, z2]) sphere(r = tube_r, $fn = 24);
}
}
// --- Top connection bar ---
// From arc top endpoint back to mug body (X = 0 plane intersect, embed deep)
x_top = arc_cx + arc_R * cos(a_top);
z_top = handle_z + arc_R * sin(a_top);
hull() {
translate([x_top, 0, z_top]) sphere(r = tube_r, $fn = 24);
translate([outer_r - 2, 0, z_top]) sphere(r = tube_r, $fn = 24);
}
// --- Bottom connection bar ---
x_bot = arc_cx + arc_R * cos(a_bot);
z_bot = handle_z + arc_R * sin(a_bot);
hull() {
translate([x_bot, 0, z_bot]) sphere(r = tube_r, $fn = 24);
translate([outer_r - 2, 0, z_bot]) sphere(r = tube_r, $fn = 24);
}
}
}
module mug_body() {
difference() {
cylinder(r = outer_r, h = mug_h);
translate([0, 0, bot_t])
cylinder(r = inner_r, h = mug_h - bot_t + 0.1);
}
}
// Final model
union() {
mug_body();
handle();
}